
No products

Automatic parachute deployment with Pixhawk
Since the version 3.2 of the APM:Copter firmware it is now possible to release a parachute from the flight controller ! It can be done manually but also automatically !
Please be careful with this feature as it is still experimental (as of the 25 of July 2015).
What you will need
A all in one system available off the shelf ready to be mounted on your multirotor, such as those :
Or, if you'd rather make it yourself. You will need to build your own deployment mechanism triggerablewith a PWM signal like a servo. You'll then need to add a parachute, once again you could choose to make it yourself but there's some fine aerodynamics at play and we recommend choosing one of the commercialy available parachutes from Opale, MARS or Fruity Chutes. Choose a parachute large enough to slow your aircraft to 5m/s maximum.
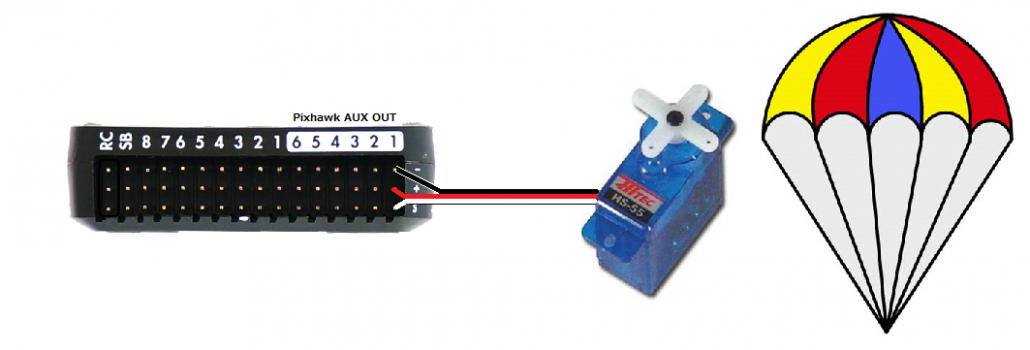
Connecting a servo to the Pixhawk
Most parachutes are triggered with a servo. And that's good because it is at the moment the only method supported by the Pixhawk (it should soon be possible to trigger a relay).
Connect your servo to one of the AUX OUT pins : 1, 2, 3 or 4.
Confifuring the parachute deployment with Mission Planner
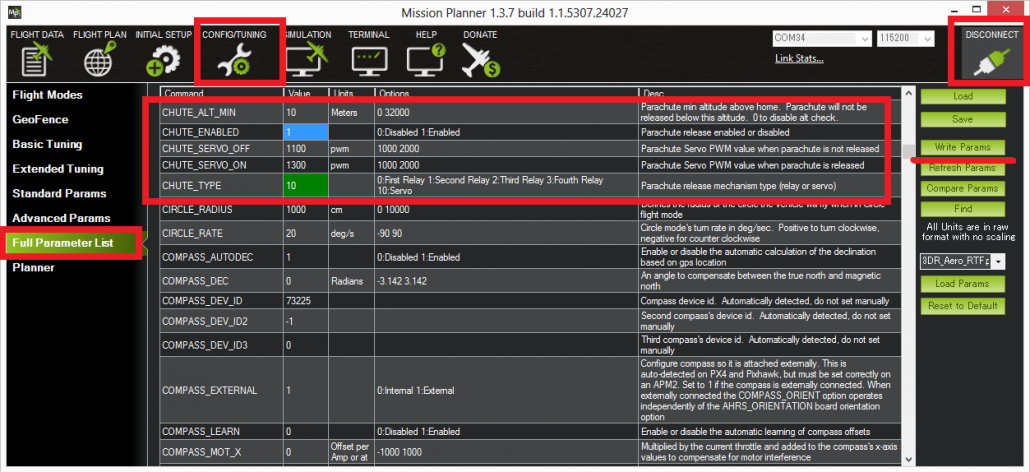
Everything on the software side is done with the Mission Planner software, available for free here. Go to the "Full Parameter List" and change the values of the parameters shown on the picture below
- CHUTE_ENABLE = “1″ Enable/Disable the parachute
- CHUTE_TYPE = “10″ Choose between servo or relay (relay is not yet functional)
- CHUTE_SERVO_ON Servo position to release the parachute
- CHUTE_SERVO_OFF Servo position when the parachute is not released
- RC9_FUNCTION = “27″ Choose the AUX OUT pin (1 to 4) where the servo is connected

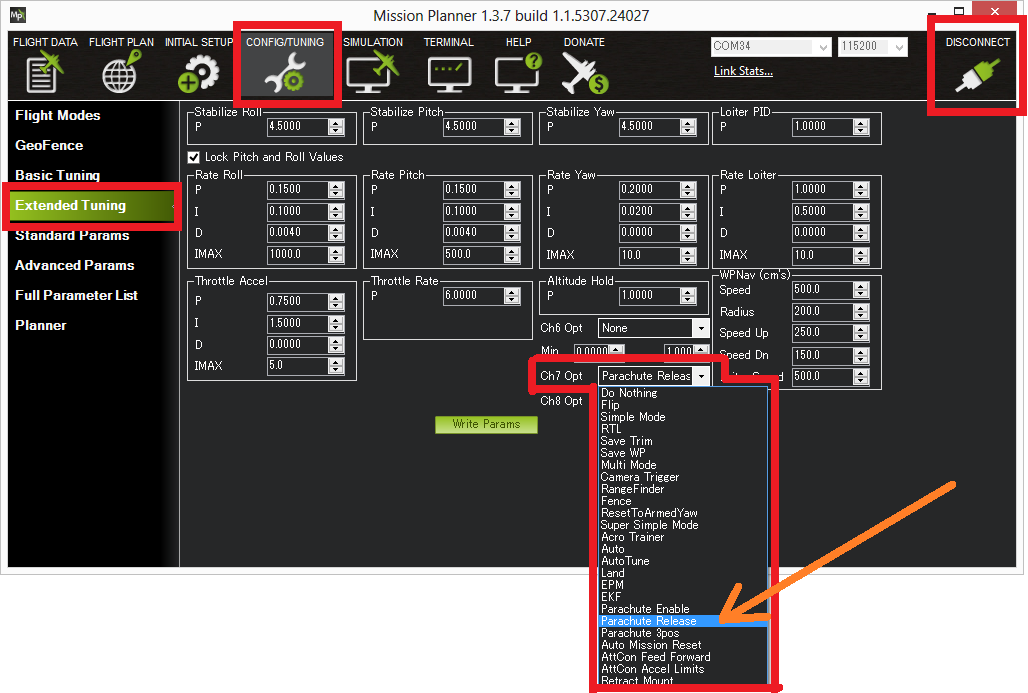
If you want to trigger the parachute manually you may do in the "Config/Tuning" tab, "Extended Tuning" Menu, change the "Ch7 Opt" parameter and select "Parachute Release".
When will the parachute be released ?
When the "Crash check" estimate that the aircraft ahas lost control and lost altitude. The motors will then be stopped and the parachute released. The following checks must be true for 2 seconds for the "Crash check" to decide to release the parachute :
- Motors are armed.
- The throttle stick on the RC is at its minimum (or the RC failsafe kicked in meaning the pilot does not have control anymore).
- The aircraftis not in FLIP or ACRO flight mode.
- The roll and/or tilt angle is 20° more or 20° less than the expected.
- The barometer measure a vertical speed of 5m/s or more.
- The aircraft is above the altitude defined by the parameter CHUTE_ALT_MIN (the minimum altitude to release the parachute)
For more informations, please visit the Arducopter wiki : http://copter.ardupilot.com/wiki/parachute
Related products
-

4,0m² (69J 5kg Multirotor) -...
219,00 € -

6,0m² (69J 8kg Multirotor) -...
249,00 € -

1.8m² - Opale rescue parachute
114,90 € -
 115,83 €
115,83 € -

12,0m² (69J 14kg Multirotor) -...
359,00 € -

15,0m² (69J 25kg Multirotor) -...
407,50 €
Leave a CommentLeave a Reply
Blog archives
Featured Products
-

Crossfly 7m² / 75ft² parachute
329,00 €
Crossfly 3m² / 32ft² parachute
189,00 €
Crossfly 1m² / 11ft² parachute
106,90 €

Latest Comments
-

POPPRE Zoltan
on Parachutes, DGAC, drones and S3 scenario - New... -

Marchico Robert
on Rescue parachutes for multirotor drones -

Gaël Billon
on Automatic parachute deployment with Pixhawk -

Gaël Billon
on Automatic parachute deployment with Pixhawk
Blog search
New products
No New products
2 Comments
Gaël Billon 07/25/2015 Reply
Bonjour, merci pour l’info, je n’avais pas entendu parler de cette partie de la nouvelle règlementation.Si on parle d’un déclenchement en moins de deux secondes après constatation de la défaillance, je ne suis pas sur qu’un humain déclenche plus rapidement.
Si on parle de déploiement en moins de 15 mètres, ça dépendra uniquement du type de parachute.
Le déclenchement manuel est toujours possible même si on autorise le Pixhawk à déployer automatiquement.
Je pense que la DGAC n’y verra pas d’inconvénient, du moment que le système est fiable et qu’il ne déclenche pas n’importe quand.
Gaël Billon 07/25/2015 Reply
Bonjour,étant moi-même adepte du modèle arduino (APM/Pixhawk) les infos données ici me sont familières et comme je suis certain que tous les opérateurs autorisés ont à coeur de suivre la réglementation, je me permets de souligner une limite à avoir en tête au regard du projet de nouvelle réglementation (« déclenchement du parachute avant que le drone n’ait chuté de 15m »): si la chute est de 5m/s, on est dans les clous mais à partir de 8m/s, on ne peut pas respecter la réglementation en se basant sur cet automatisme.
Or, avec d=1/2g * t2, au bout de deux secondes, un drone en chute libre (quelle que soit sa masse) aura parcouru près de 20 mètres. Notez que cela reste purement théorique: la probabilité d’une chute libre (arrêt de tous les moteurs en même temps) est faible.
Bons vols à tous.