
Aucun produit

Déclenchement automatique du parachute sur Pixhawk
Ca y'est ! Depuis la version 3.2 d'arducopter sur Pixhawk il est désormais possible de déclencher un parachute depuis le contrôleur de vol ! Que ce soit de façon manuelle ou automatique ! Attention ! cette fonctionnalité est encore expérimentale (au 25 juillet 2015).
Ce dont vous aurez besoin
Un système de parachute prêt à l'emploi comme ceux là :
Ou si vous préferez le faire vous même, il vous faudra élaborer un système de déclenchement et d'éjection qui peut être activé par un signal PWM (comme un servo par exemple) couplé à un parachute assez large pour ralentir suffisamment la chute de votre drone à 5m/s au maximum. Vous pouvez trouver des parachutes chez MARS, Opale ou Fruity Chutes.
Connexion du servo de déclenchement du parachute au Pixhawk
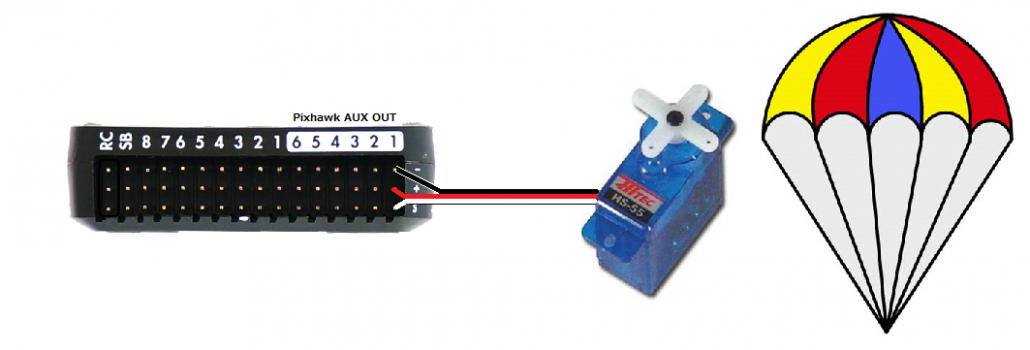
La plupart des parachutes sont déclenchés par servo. Ça tombe bien c'est pour l'instant la seule méthode supportée par le Pixhawk (il sera bientôt possible de le déclencher par relais).Il faut connecter le servo à un des pins AUX OUT 1, 2, 3 ou 4.
Configuration du parachute avec Mission Planner
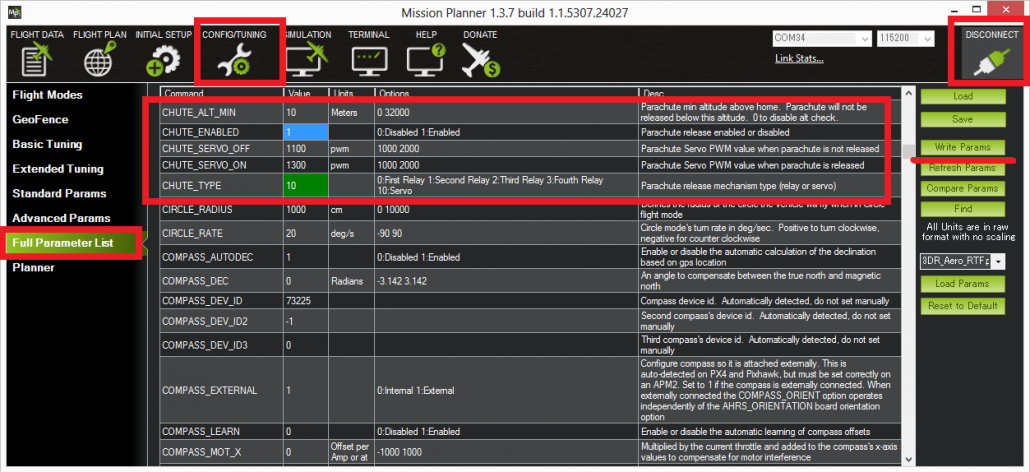
Le reste de la configuration se fait à l'aide de Mission Planner/DroidPlanner dans la "Full parameter list" grâce aux nouveau paramètres que voici :
- CHUTE_ENABLE = “1″ Pour activer/désactiver le parachute
- CHUTE_TYPE = “10″ Pour activer le déclenchement par servo plutôt que par relais (pas encore fonctionnel)
- CHUTE_SERVO_ON Position du servo pour libérer le parachute
- CHUTE_SERVO_OFF Position du servo lorsque le parachute n'est pas déclenché.
- RC9_FUNCTION = “27″ Pour définir sur quel pin AUX OUT (de 1 à 4) le servo est connecté

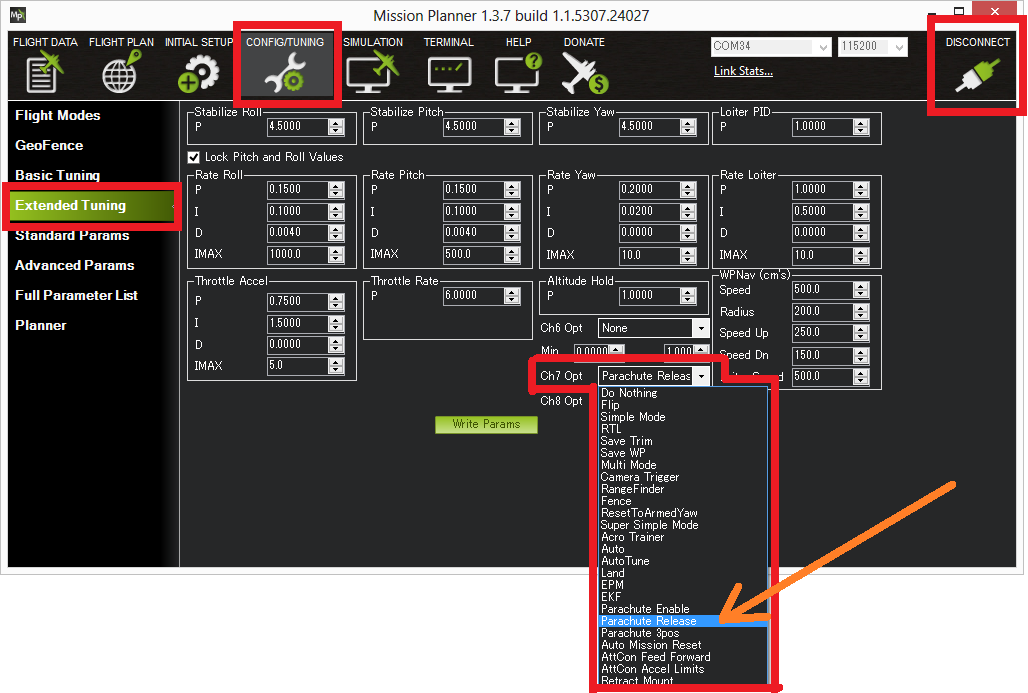
Pour déclencher le parachute manuellement il faut définir le "Ch7 Opt" sur "Parachute Release" dans l'onglet "Extended Tuning"
Quand le parachute se déclenche-t-il ?
Quand le "Crash Check" estime que l'aéronef à perdu le contrôle, perdu de l'altitude et est globalement défaillant. Les moteurs seront alors arrêtés et le parachute déployé automatiquement. Les conditions suivantes doivent êtres remplies pendant 2 secondes pour que le "Crash Check" décide de déployer le parachute :
- Les moteurs sont armés.
- Le manche des gaz sur la técommande est au minimum (ou le failsafe radio s'est déclenché et le pilote n'a donc plus les commandes).
- Le véhicule n'est pas en mode de vol FLIP ou ACRO.
- L'angle de roulis et/ou de tangage de l'aéronef est 20° trop éloigné de l'angle dans lequel il devrait se trouver.
- Le baromètre mesure une vitesse de chute de 5m/s ou plus.
- L'aéronef est au dessus de l’altitude définie par le paramètre CHUTE_ALT_MIN (altitude minium de déclenchement du parachute).
Pour plus d'infos, rendez vous sur le wiki Arducopter (en anglais) : http://copter.ardupilot.com/wiki/parachute
Produits liés
-

Opale 4,0m² (69J 5kg Multirotor)
219,00 € -

Opale 6,0m² (69J 8kg Multirotor)
249,00 € -

1.8m² - Parachute de secours Opale
114,90 € -
 115,83 €
115,83 € -

12,0m² (69J 14kg Multirotor) -...
359,00 € -

Opale 15,0m² (69J 25kg Multirotor)
407,50 €
Leave a CommentLeave a Reply
Blog archives
Featured Products
-

Parachute Crossfly 7m²
329,00 €
Parachute Crossfly 3m²
189,00 €
Parachute Crossfly 1m²
106,90 €
Opale 15,0m² (69J 25kg Multirotor)
407,50 €
Latest Comments
-

POPPRE Zoltan
on Parachutes, DGAC, drones et scénario S3 -... -

Marchico Robert
on Parachutes de secours pour drones multirotors -

Gaël Billon
on Déclenchement automatique du parachute sur Pixhawk -

Gaël Billon
on Déclenchement automatique du parachute sur Pixhawk
Blog search
Nouveaux produits
No New products
2 Comments
Gaël Billon 25/07/2015 Reply
Bonjour, merci pour l’info, je n’avais pas entendu parler de cette partie de la nouvelle règlementation.Si on parle d’un déclenchement en moins de deux secondes après constatation de la défaillance, je ne suis pas sur qu’un humain déclenche plus rapidement.
Si on parle de déploiement en moins de 15 mètres, ça dépendra uniquement du type de parachute.
Le déclenchement manuel est toujours possible même si on autorise le Pixhawk à déployer automatiquement.
Je pense que la DGAC n’y verra pas d’inconvénient, du moment que le système est fiable et qu’il ne déclenche pas n’importe quand.
Gaël Billon 25/07/2015 Reply
Bonjour,étant moi-même adepte du modèle arduino (APM/Pixhawk) les infos données ici me sont familières et comme je suis certain que tous les opérateurs autorisés ont à coeur de suivre la réglementation, je me permets de souligner une limite à avoir en tête au regard du projet de nouvelle réglementation (« déclenchement du parachute avant que le drone n’ait chuté de 15m »): si la chute est de 5m/s, on est dans les clous mais à partir de 8m/s, on ne peut pas respecter la réglementation en se basant sur cet automatisme.
Or, avec d=1/2g * t2, au bout de deux secondes, un drone en chute libre (quelle que soit sa masse) aura parcouru près de 20 mètres. Notez que cela reste purement théorique: la probabilité d’une chute libre (arrêt de tous les moteurs en même temps) est faible.
Bons vols à tous.